Higher Order - Material Feedback in Robotic Extrusion
Diese Arbeit untersucht die Möglichkeiten, die physische Umgebung in die digitale zu integrieren, indem Abweichungen, die sich aus den unterschiedlichen Materialeigenschaften ergeben, schrittweise in eine maßgeschneiderte Fertigungsstrategie einfließen können.
Die derzeitige Materialpraxis in der Architektur investiert immense Anstrengungen in die Erforschung neuer Materialien und die Bestimmung ihres Verhaltens. Dennoch bleibt die Art und Weise der Manipulation unverändert, indem Materialien eine bestimmte Form aufgezwungen wird, anstatt ihr spontanes Verhalten auszulösen. Dies ist vor allem auf die Trennung zwischen Entwurfs- und Herstellungsprozess zurückzuführen. Die Entscheidungen über die Herstellung werden im Voraus getroffen, und die Fertigung ist eine bloße Ausführung von Maschinenanweisungen, die ein vorhersehbares Verhalten der Materialien voraussetzt. Die Prozesse könnten jedoch reaktionsfähig sein und sich an unterschiedliche Bedingungen anpassen und auf Veränderungen reagieren.
Die vorliegende Arbeit untersucht das Potenzial der Roboterfertigung auf der Grundlage der additiven Fertigung für die iterative Materialaggregation auf der Grundlage des physikalischen Materialverhaltens. In einer Reihe von Fallstudien erwies sich das Materialfeedback nicht nur als entscheidend für die Korrektur von Werkzeugwegen und damit für die Kompensation von Abweichungen, sondern es ermöglicht auch einen allgemeineren Ansatz für Materialität und Formgebungsprozesse.
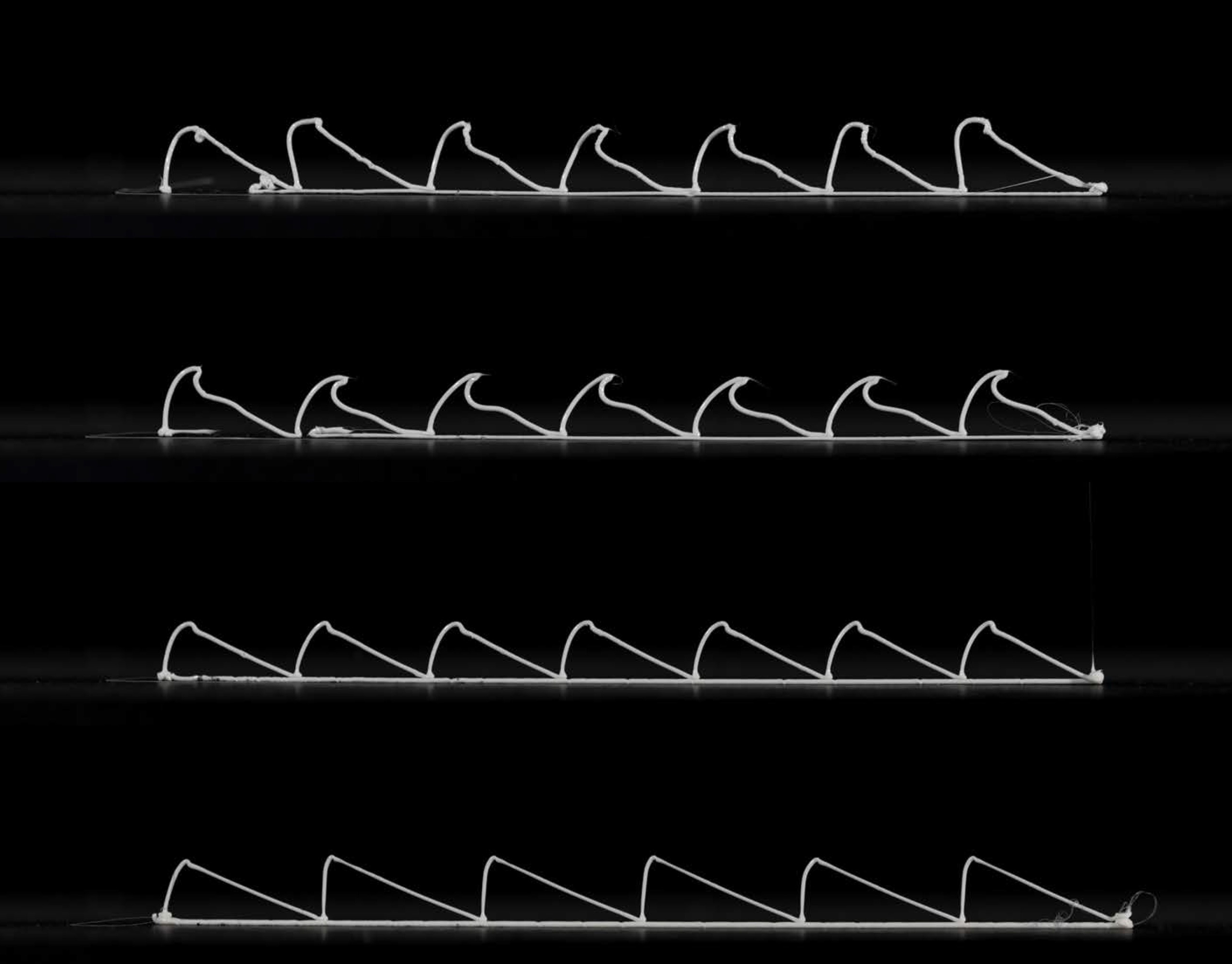
Ein Kunststoff-Extrusionskopf legt Material im 3D-Raum ab, geführt von einem 6-achsigen Industrieroboter, der ferngesteuert wird. Dieser Aufbau wurde durch zusätzliche Geräte erweitert, die Informationen aus der physikalischen Umgebung in das externe Steuerungssystem einspeisen. Aufgrund des unvorhersehbaren Materialverhaltens wurde eine Rückkopplung - Position der Strukturteile im Raum - von der abgelegten Schicht in den Prozess eingeführt, um die nachfolgenden Werkzeugwege für den Roboter-Endeffektor und somit die Bereiche der Materialanhäufung zu definieren. Dies erleichtert die Anpassung einer robotergesteuerten additiven Fertigung, bei der das Design nicht vordefiniert und ein Ergebnis der automatisierten Fertigung ist, sondern das Material die Roboter-Werkzeugwege beeinflusst und somit an der Entstehung der Form teilnimmt.